

























实力雄厚
strength公司成立于2016年,是一家集研发、生产、销售和服务为一体的创新型企业,公司专注于振动筛分、给料输送、混料行业







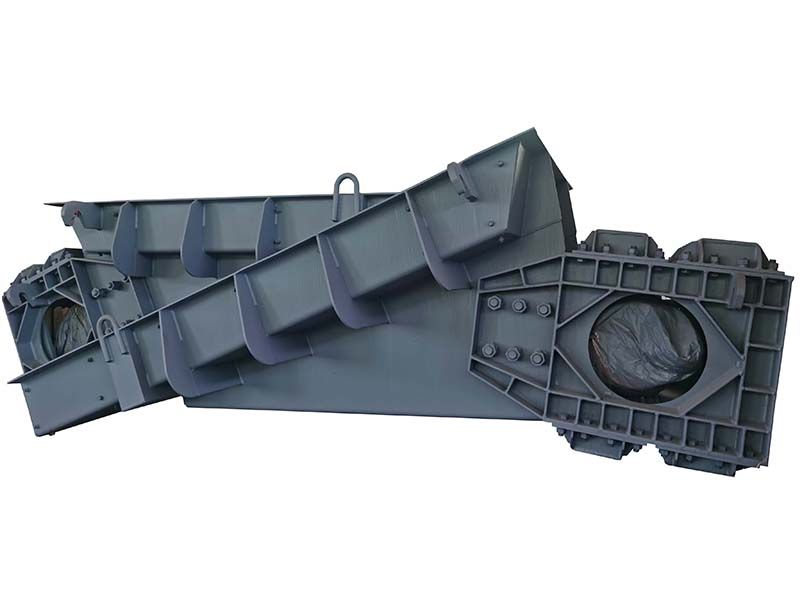
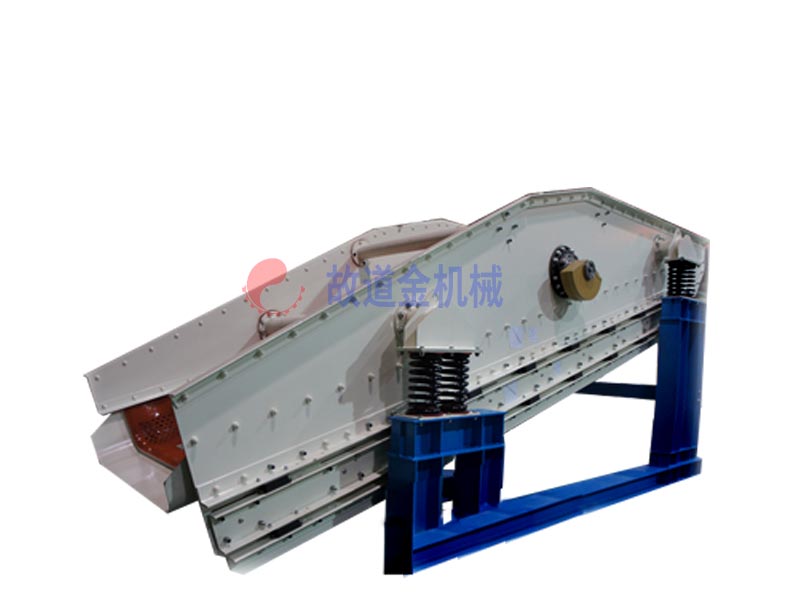
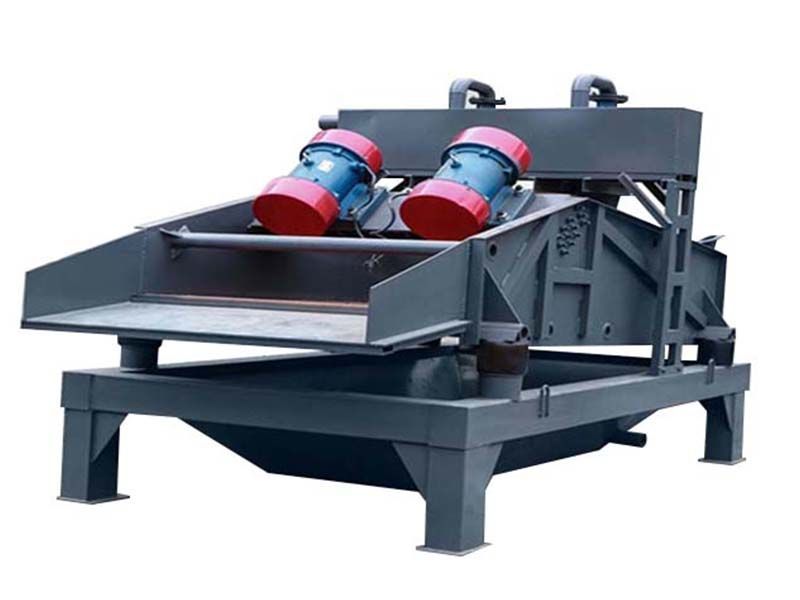
产品中心
Product Center品牌优势
Brand advantages01
ADV.
02
ADV.
03
ADV.
04
ADV.
成功案例
success cases
成功案例

成功案例

成功案例

成功案例

成功案例

成功案例

成功案例

成功案例

成功案例

成功案例

成功案例

成功案例

成功案例

成功案例

成功案例

陕西金桥煤炭

邯郸标准件工业园

山西潞安集团

四川攀钢集团

广东东润建筑材料
公司简介
Company Profile
开云官方网页版是一家研发、生产、销售和服务集成为一体的创新型企业,公司专注于振动筛分、给料输送、混料行业多年,拥有丰富的一线生产技术。是新乡市有能力承建从破碎到输送筛分整条生产的公司之一。 公司主营轻重型直线振动筛、圆振筛、强力筛、概率筛、摇摆筛,等各种系列的筛机以及各种规格型号的配套产品如振动给料机、斗式提升机、垂直振动给料机、带式给料机、螺旋提升机、构成完整的破碎、输送、筛分系统生产链,并已广泛应用于煤炭、冶金、矿山、制药、食品、化工、建材、电力、环保等众多领域。 故道金机械视质量为生命,奉顾客为上帝,并一贯遵循对每一道工序负责、对每一台产品负责、对每一位用户负责的质量方针,竭诚为用户服务。我们所作的一切将***为您着想,我们深信:质量是打开市场的金钥匙;我们深信:对您奉献一颗真诚的心同样会得到真诚的回报!热烈欢迎新老用户、科技专家、行业志士与我公司建立发展各种形式的业务关系,故道金机械竭诚期待与广有志之士携手合作,共创大业。
生产设备
production equipment源头厂商
公司是源头生产厂家品质保障
产品符合国家相关标准经验丰富
拥有15年以上从业经验售后无忧
24小时一对一服务18637300467

扫一扫 关注我们








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}